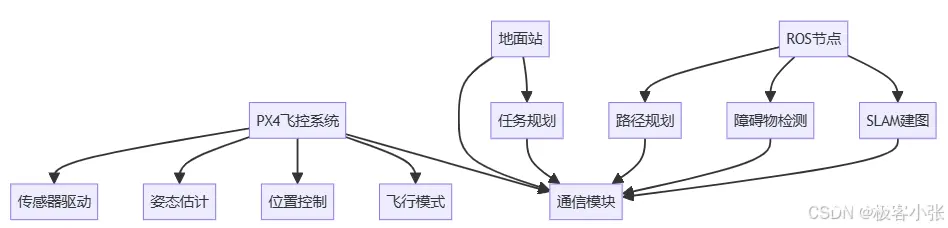
本项目旨在设计并实现一款高度自主的自动巡航无人机系统。该系统能够按照预设路径自主飞行,完成各种巡航任务,如电力巡线、森林防火、边境巡逻和灾害监测等。基于STM32F4和PX4的嵌入式飞控系统,实现了稳定的飞行控制...
浏览 61 次 标签: 全自主巡航无人机项目思路:STM32/PX4 + ROS + AI 实现从传感融合到智能规划的端到端解决方案